


RobotSoc project
RobotSoC is a research project from the ETIS Lab in Cergy-Pontoise (France). This work is done in collaboration with Benoït Miramond.
A recent trend in several robotics tasks is to consider vision as the primary sense to perceive the environment or to interact with humans. Thus vision processing becomes a central and challenging matter for the design of real-time control architectures.
We follow in this project a biological inspiration to propose a real-time and embedded
control system relying on visual perception.
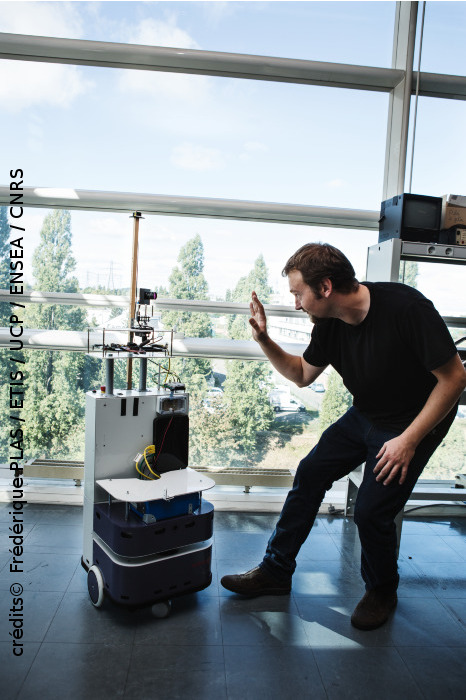
The RobotSoc robot is composed of a Robulab robot, a magnetic compass, a smart-camera (FPGA) with a pan system and an embedded PC allowing to simulate our neural control architecture.
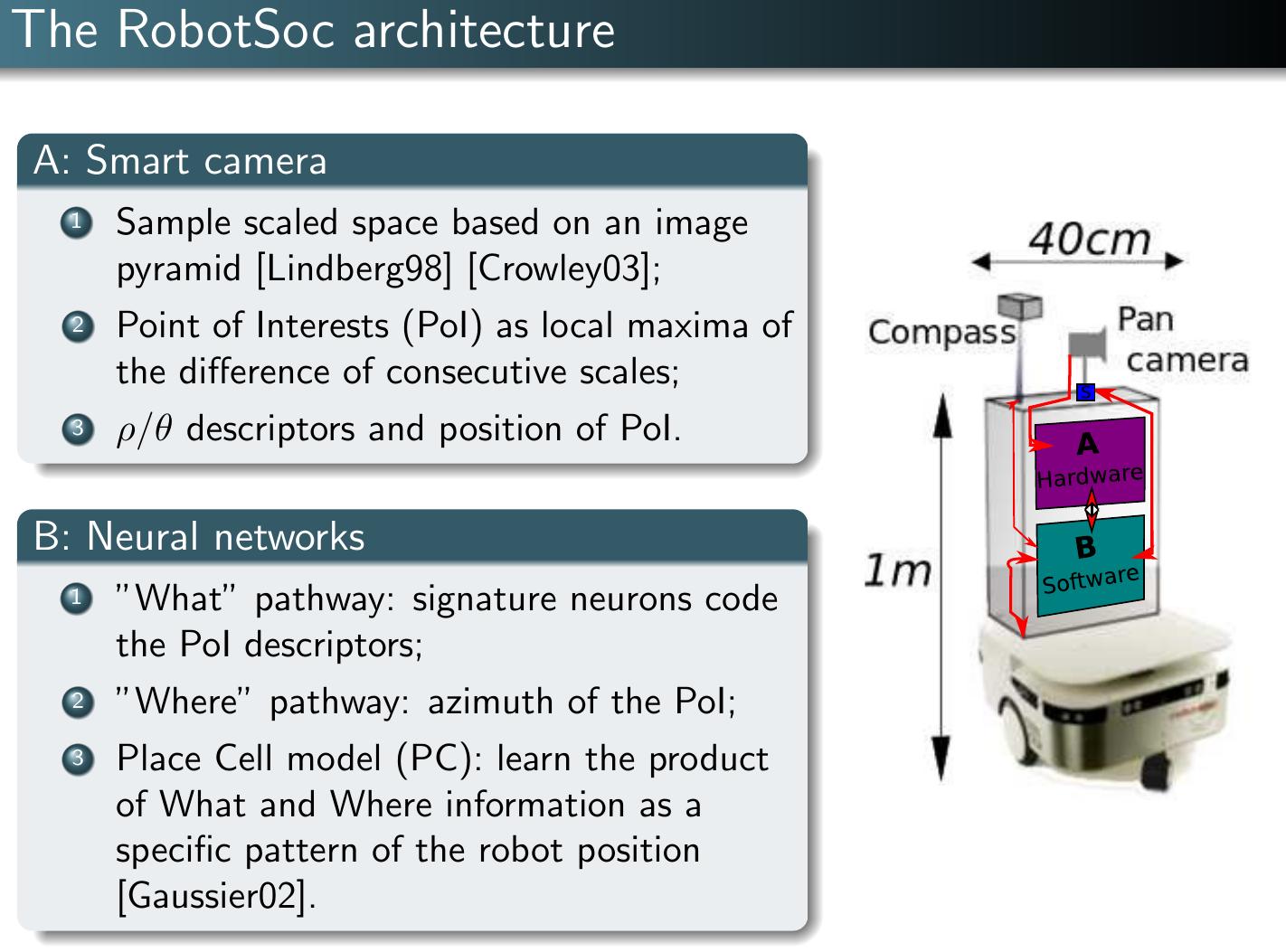
The smart camera is based on an attentional mechanism extracting saillant zones in the image from a scale-space representation. This bottom-up information is then coded, learned and combined with other sources of information in neural networks to allow the robot to recognize places or objects. These neural networks can also biais the attentional mechanism according to the current task (top-down modulation).
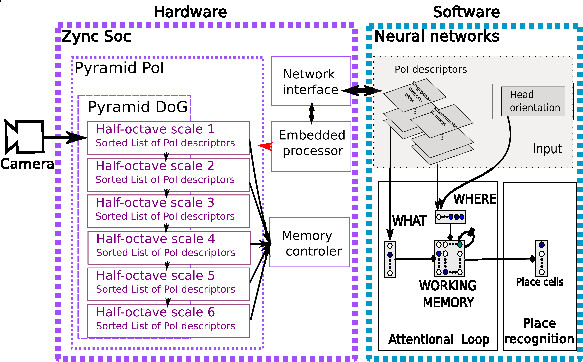 The architecture is implemented for a part in hardware (smart camera) and for an other part in software (neural network simulator: Promethe).
The architecture is implemented for a part in hardware (smart camera) and for an other part in software (neural network simulator: Promethe).
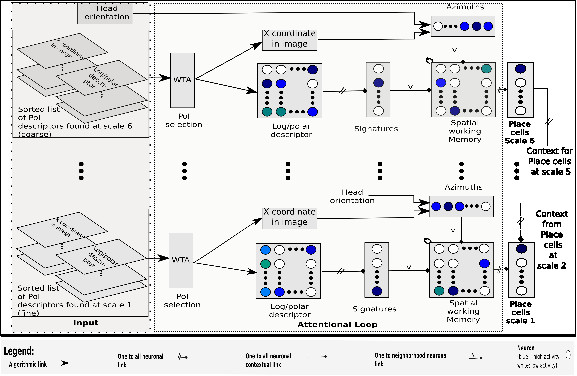 A neural model following a coarse to fine approach to code extracted landmarks.
A neural model following a coarse to fine approach to code extracted landmarks.