The robots
Pictures of some of the robots we use at the Neurocybernetic Team of ETIS lab. can be found on this page.RobotSoc
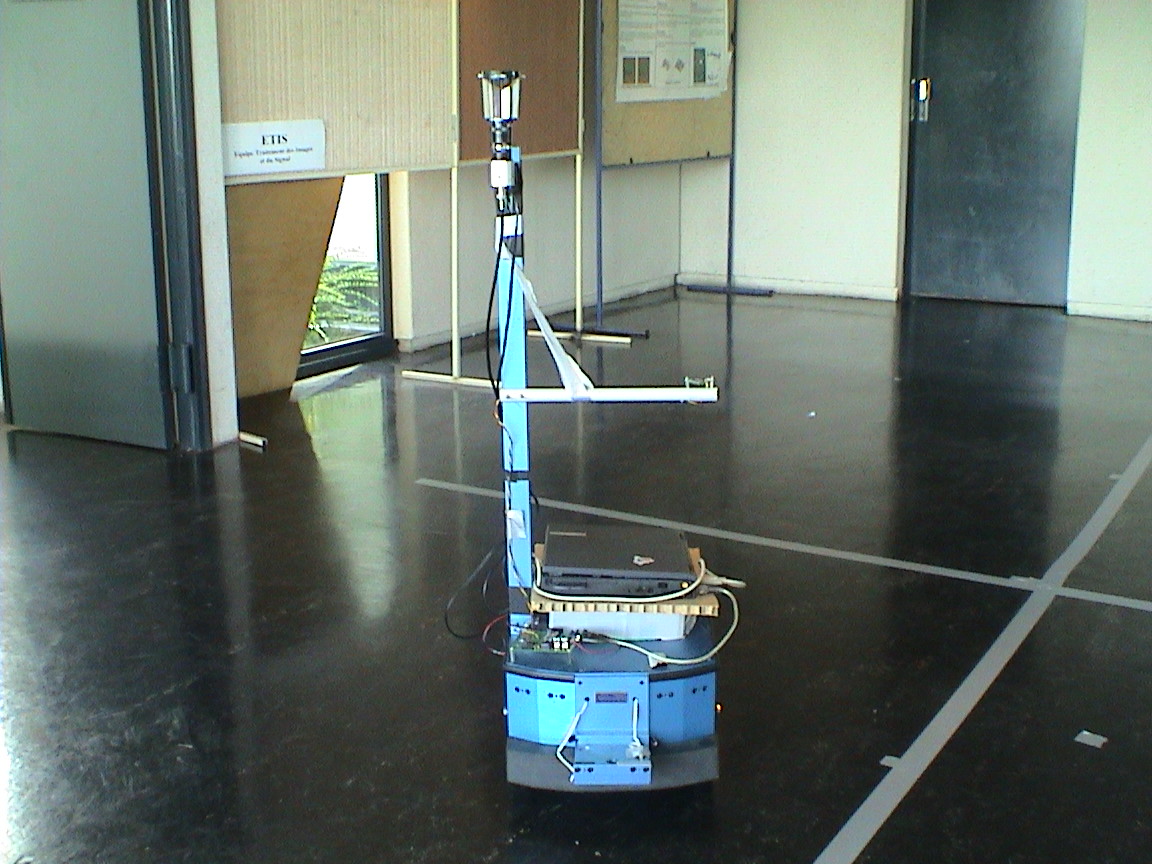
The RobotSoC robot was developped in collaboration with Benoït Miramond at the time he was working at ETIS lab. It is composed of a Robulab robot, a magnetic compass, a smart-camera (FPGA) with a pan system an an embedded PC allowing to simulate our neural control architecture. We use this real-time and embedded system to study some of our models on visual and spatial perception.
The smart camera is based on an attentional mechanism extracting saillant zones in the image from a scale-space representation. This bottom-up information is then coded, learned and combined with other sources of information in neural networks to allow the robot to recognize places or objects. These neural networks can also biais the attentional mechanism according to the current task (top-down modulation).
 See this page for more information.
See this page for more information.
The Roburoc :
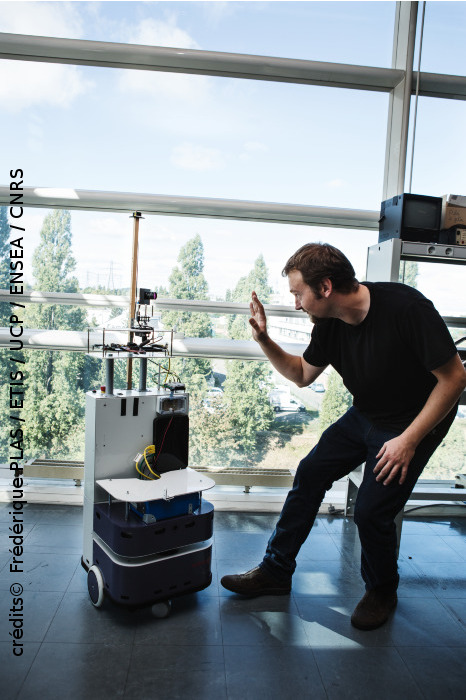
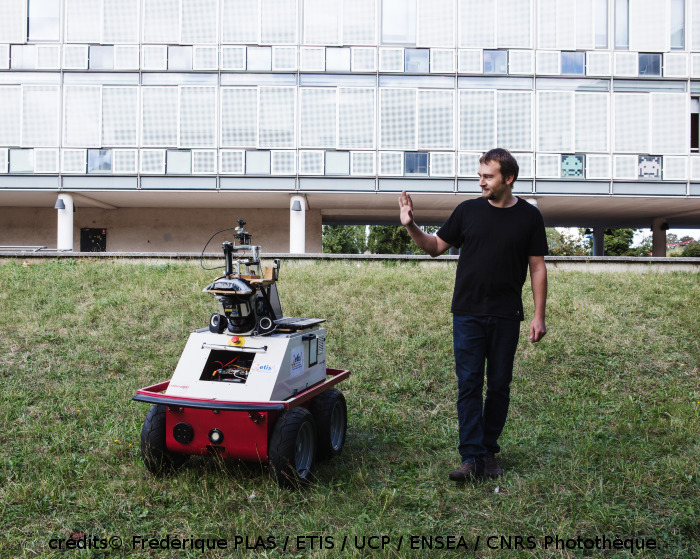
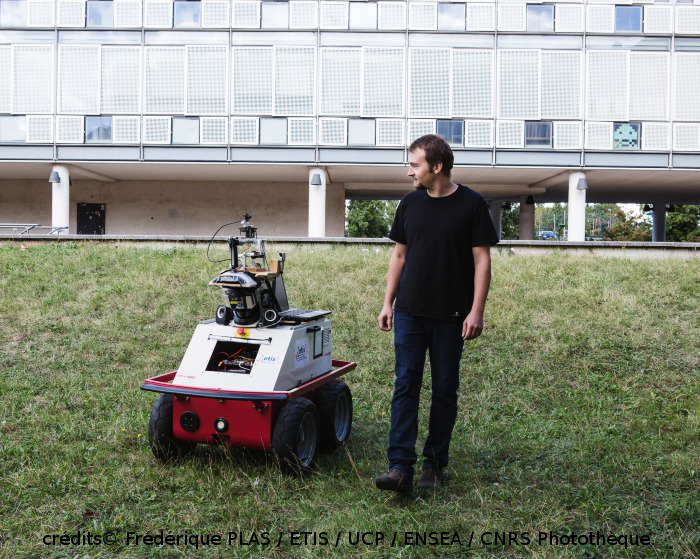
This is our robot to conduct outdoor navigation experiments. The Roburoc is equipped with 2 ultrasound range sensors (in front and back), a pan-tilt-roll compensated camera, a magnetic compass, two embedded PC, a SICK laser range sensor. and a joystick linked to a leash.



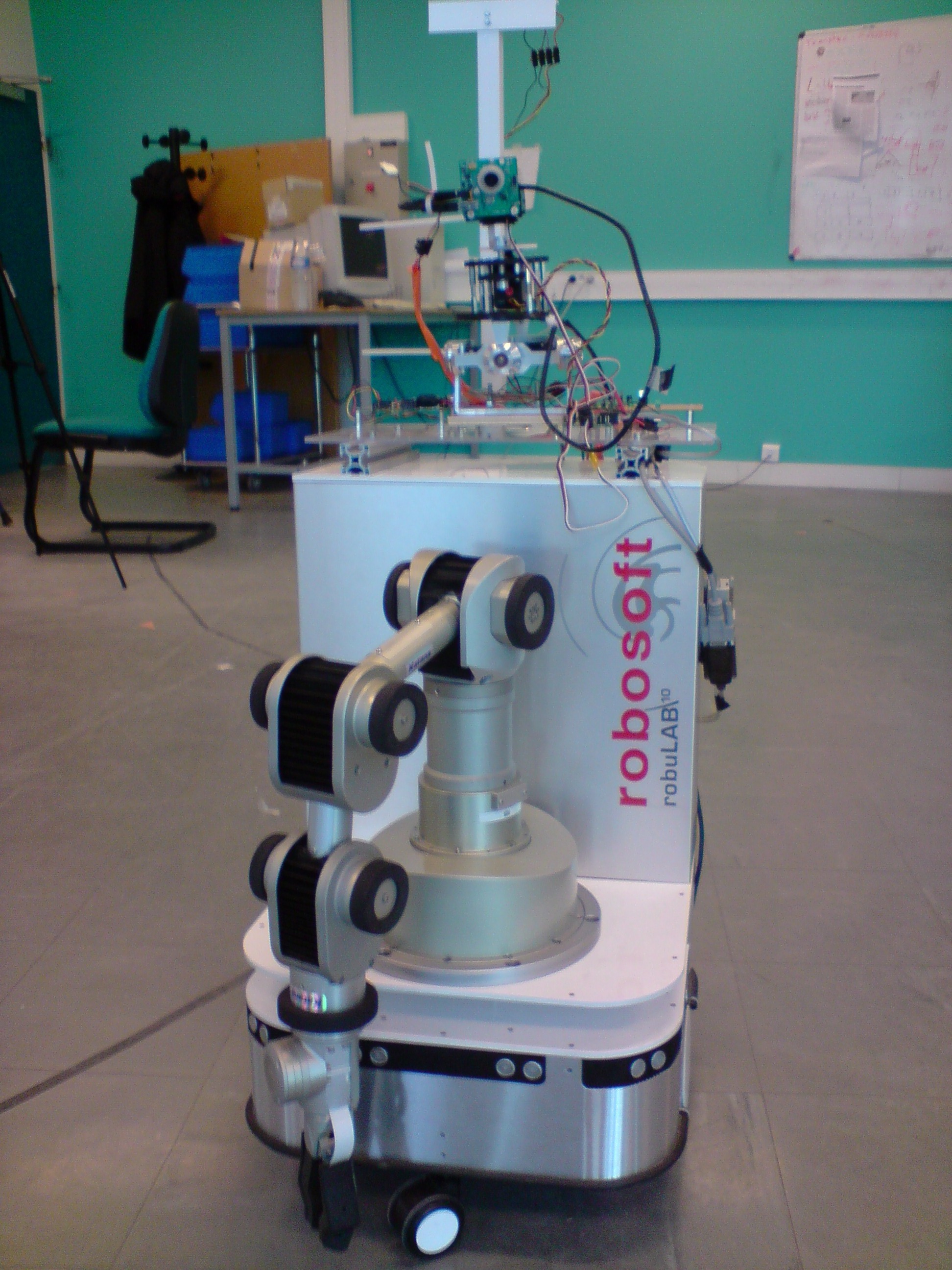
The Robulabs
The Robulab robots are used for indoor navigation (watch videos here. ). They are equipped with ultrasound range sensors, a pan-tilt camera, a magnetic compass, an embedded PC and sometimes a SICK laser sensor. They can also be equipped with a roboic arm (here a Katana) to perform some manipulation tasks.

Berenson :
The Berenson robot is equipped is a humanoid robot with an expressive head. He visits museums to develop its own aesthetic sense through its interactions with other visitors.

See this page for more information.
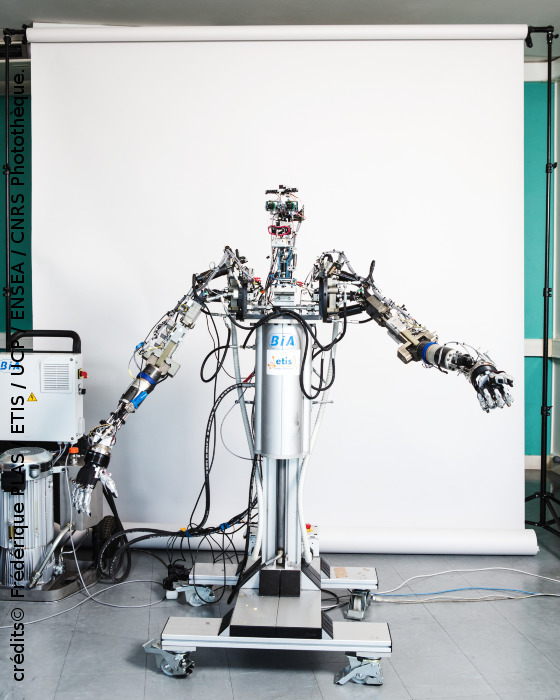
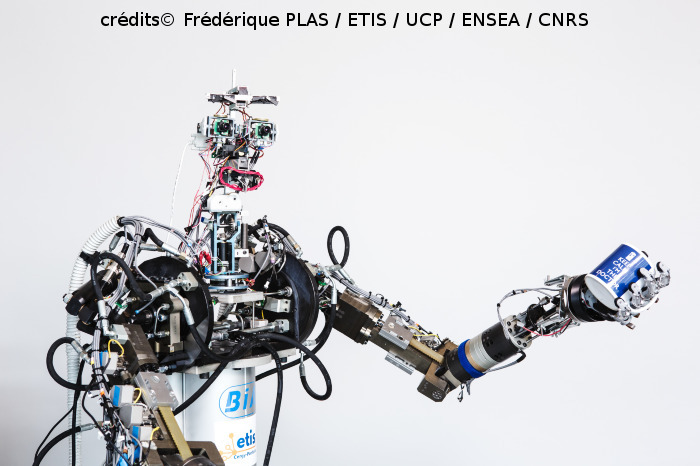
Le robot Tino :
Tino is an hydrolic humanoid robot (BIA-ETIS -LISV).
See this page for more information.
The old robots :
Somes of the old robots I used during my PhD
The Koalas :


The Labo3